
The end of the first week with SNoW








The first week ended with the SNoW scenario which took place south east from Portinho da Arrábida. It centers on an attempt of a unique observations of nonlinear internal solitary waves in the region of influence of the Sado Estuarine outflow using new and emergent oceanographic instrumentation. In this scenario, high-resolution observations were performed to study the front vertical and surface structure, including measurements of salinity, water temperature, turbidity and optical backscatter throughout the water column, using a synergetic network between two LAUVs (Xplore-2 and SeaCon-3), one UAV (X2O-01) and remote sensing platforms.
The survey scenario consisted on the collection of hydrographic data (CTD, chlorophyll, turbidity) with Xplore-2 during an ebb period (about 6 hours) along a perpendicular transect to the propagation of the estuarine front. Simultaneously, Seacon-3 equipped with an EchoSounder and a CTD, was deployed along the same transect at the surface to identify the propagation and/or generation of solitons in the thermocline interface. Both LAUVs were launched to the sea at 07.00 am, right before the ebb period start at the Sado Estuary mouth and sampled the study area until 0100pm. As satellite data represents huge advantage to a better understanding of the internal waves generation trigger in this coastal region, the operation was planned to coincide with Sentinel-2A (ocean color) overpassing at 1224am (see figure below) . Unfortunately, UAV, which would be used to track the wave’s front progression, had problems during the launch and its mission needed to be aborted. However, problems should be solved until next SNoW mission (20th July) and UAV as well as wavys GPS drifters.

The vehicles used for the experiment were:
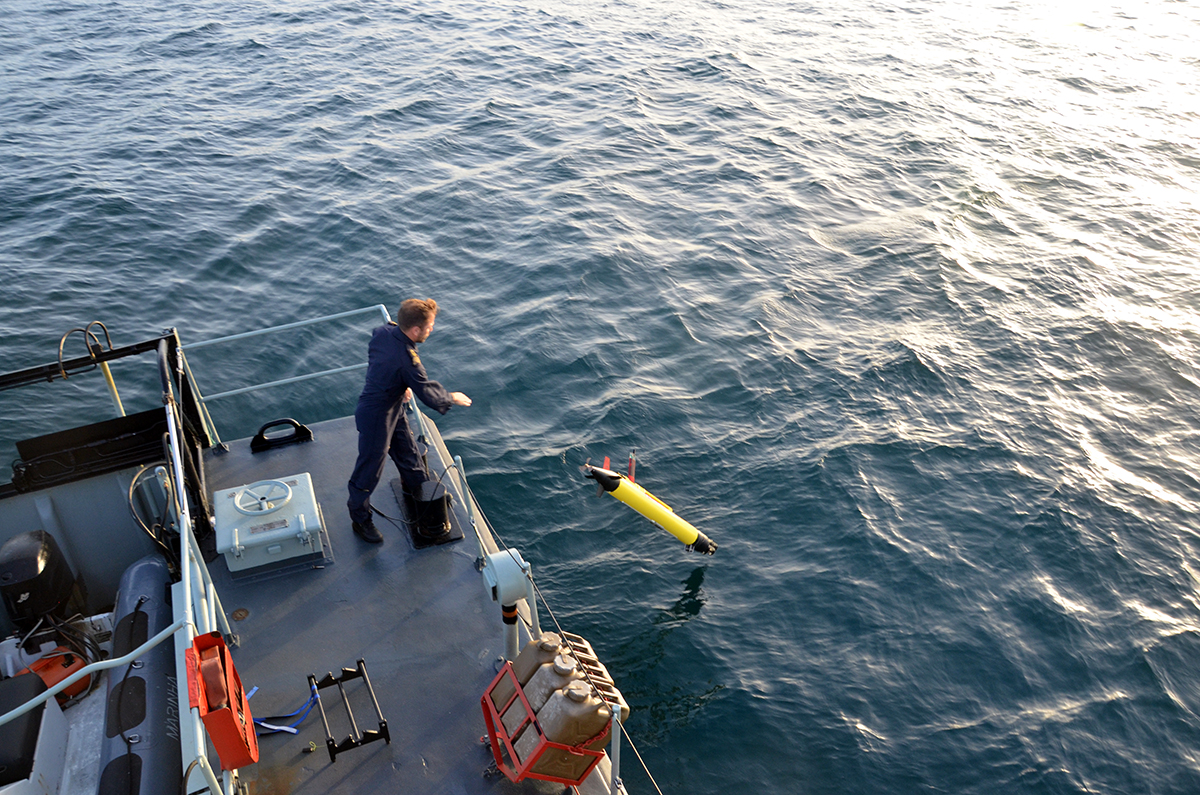
- LAUV-Xplore-2, equipped with an environmental probe measuring temperature, salinity, chlorophyll and turbidity;
- LAUV-SeaCon-3, equipped with echo-sounder and CTD sensors;
- UAV (X2O-01) equipped with thermal and hyperspectral cameras.
The sea was in perfect conditions to performe the exercises. The measured communication ranges were quite stable at 600m for Wi-Fi and more than 2 km for acoustic modem (Xplore-2). Both LAUVs were also controlled by SMS using GSM and Iridium communications.