Towards the control of multiple vehicles for seabed surveys











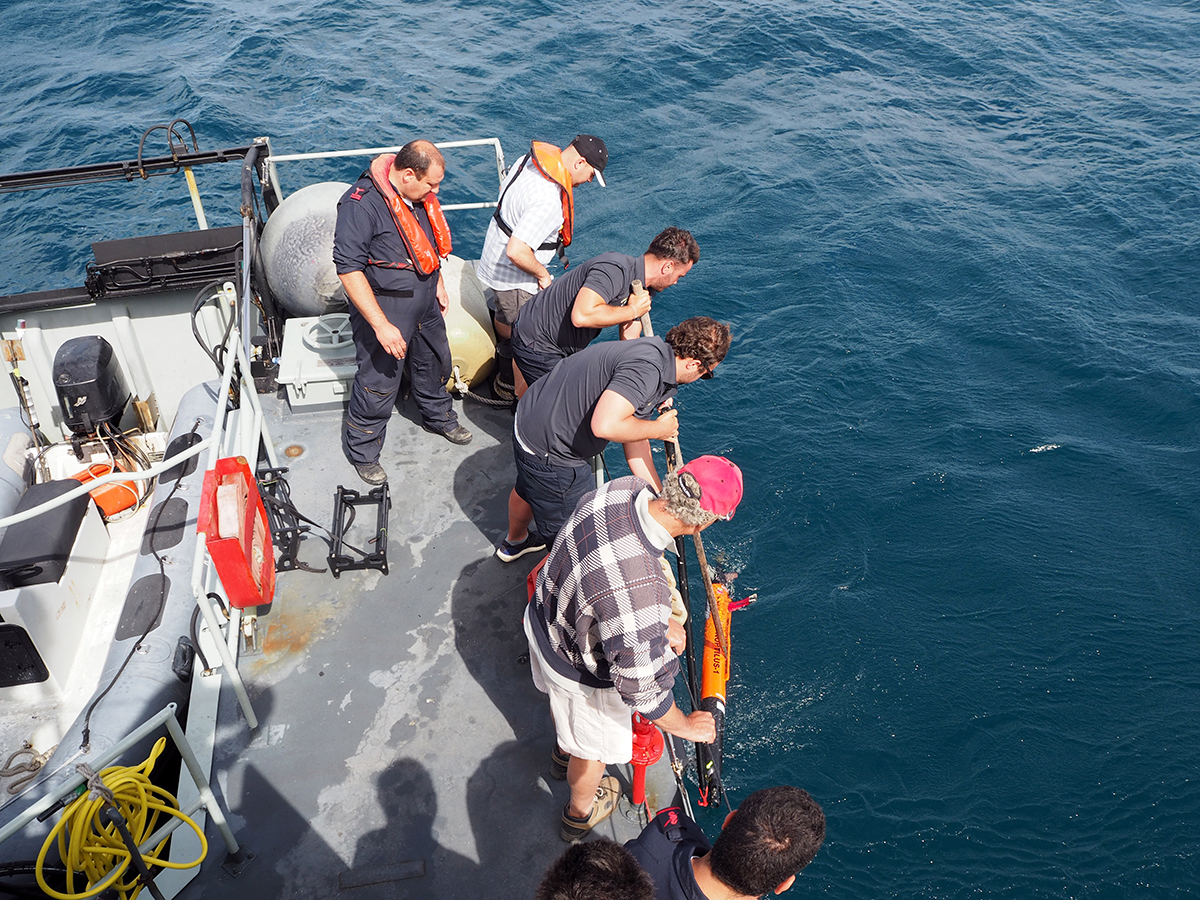
On Monday and Tuesday, the operations onboard NRP Cassiopeia aimed testing a novel approach towards the control of multiple heterogeneous vehicles for seabed surveys.
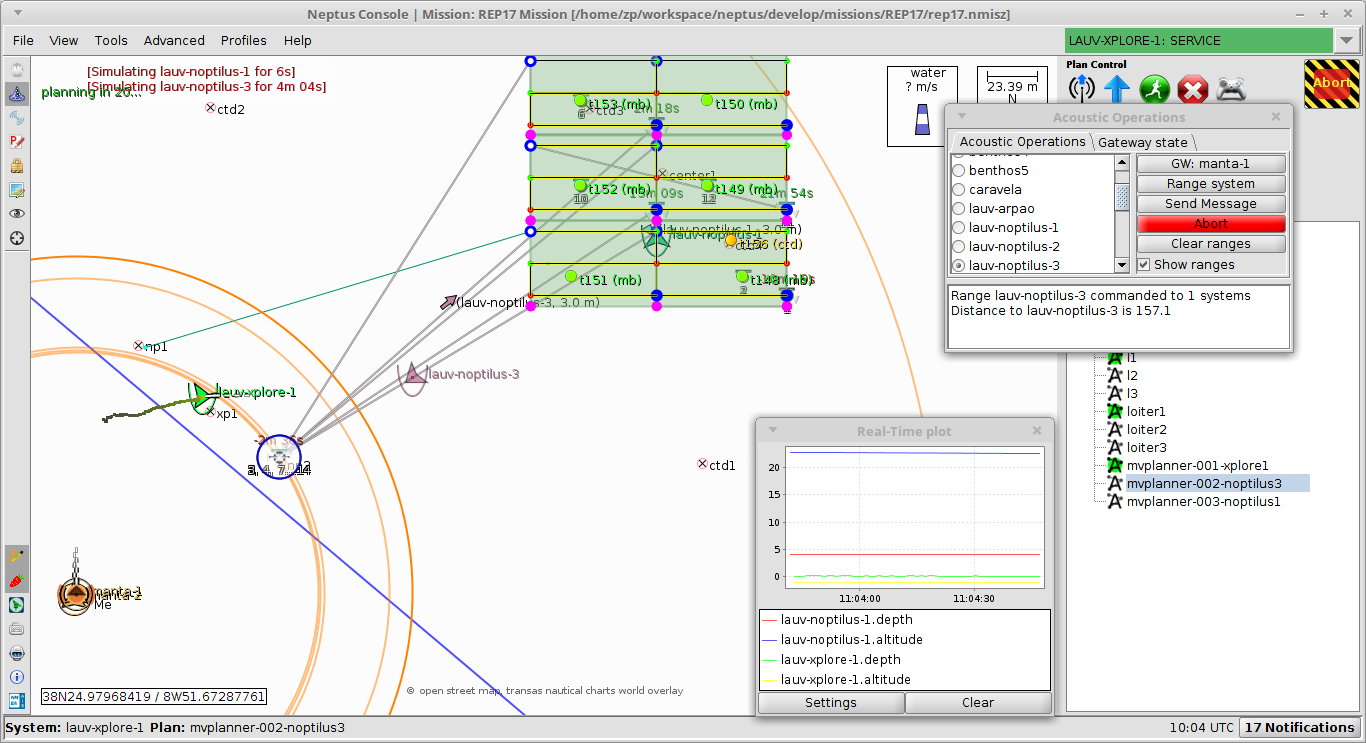
In these tests, a human operator simply specifies areas to be characterized by a team of AUVs and a distributed system takes care of creating a set of subtasks and allocating them to the controlled vehicles. There are several innovations on this approach:
- The controlled vehicles can either be connected to the operator's console or disconnected (underwater) in which case, the system predicts when the vehicles will be back to the base station to assigned new tasks.
- The vehicles are constrained to never be away from the base station for more than a specified amount of time. This is to have them communicate with the operator the state of completion of its assigned tasks.
- When vehicles undergo failures its behavior is adapted by an onboard planner (even when they are disconnected and underwater) trying to fulfill as many tasks as possible while still not staying away from the base station for more than the maximum amount of time specified by the operator.
- Vehicles and tasks (areas to be surveyed) can be added / removed at any time and system adapts to those changes.
This is an ongoing collaboration between Porto University and Czech Technical University*